在美國(guó),如果要想使用未經(jīng)FCC認(rèn)證的無(wú)線設(shè)備,必須先申請(qǐng)臨時(shí)許可,否則是違法行為。2017年3月17日,日本車(chē)用電子供應(yīng)商AlpsElectric 申請(qǐng)了STA 許可證,AlpsElectric 要測(cè)試的是名為Ukaza 的車(chē)用毫米波雷達(dá),工作頻段為76-81 GHz。這是該頻段毫米波雷達(dá)第一次公開(kāi)測(cè)試。在申請(qǐng)中,AlpsElectric 表示,公司想從5 月1 日起陸續(xù)測(cè)試3,000 臺(tái)Ukaza。Alps表示每輛車(chē)需要裝配10 組雷達(dá),因此3,000 臺(tái)Ukaza 只夠300 輛車(chē)使用。
10 天后,通用也向FCC 遞交了類(lèi)似的STA 許可證申請(qǐng),它要測(cè)試的也是Ukaza 雷達(dá)。不過(guò),通用工程師Robert Reagan 在申請(qǐng)中要求FCC 幫忙保密,因?yàn)闇y(cè)試涉及商業(yè)敏感信息。顯然,ALPS的毫米波雷達(dá)是用在通用汽車(chē)上的,這就是通用要打造的300輛的無(wú)人駕駛測(cè)試車(chē)隊(duì)(以Bolt EV為基礎(chǔ)打造,擁有兩個(gè)Velodyne的32線激光雷達(dá))。
Ukaza 雷達(dá)可不是Bolt 的唯一裝備,3 月28 日(通用申請(qǐng)后一天)博世也遞交了自己的STA 許可證申請(qǐng)。博世申請(qǐng)中表示,公司要在客戶的自動(dòng)駕駛車(chē)隊(duì)測(cè)試中程雷達(dá)(77GHz),隨后透過(guò)搜集的數(shù)據(jù)開(kāi)發(fā)新的算法。從申請(qǐng)來(lái)看,博世要測(cè)試的雷達(dá)共有650 組,夠162 輛車(chē)使用。每輛車(chē)4個(gè),與Alps 公司類(lèi)似,博世也沒(méi)有點(diǎn)出客戶的名字,但給了測(cè)試的具體地點(diǎn),從經(jīng)緯度來(lái)看,這些雷達(dá)將在舊金山、底特律和斯科茨代爾測(cè)試,唯一橫跨這三地測(cè)試的公司只有通用一家。

上圖是美國(guó)豐田研究院的無(wú)人駕駛車(chē),車(chē)每側(cè)有3個(gè)毫米波雷達(dá),推測(cè)是博世比較老的透鏡毫米波雷達(dá),每側(cè)3個(gè),估計(jì)是級(jí)聯(lián)應(yīng)用。一臺(tái)車(chē)用10個(gè)毫米波雷達(dá),應(yīng)該也是級(jí)聯(lián)應(yīng)用。
緊接著在5月16日,德州儀器推出了號(hào)稱(chēng)全球精度最高單芯片毫米波雷達(dá)傳感器,也就是工作與76-81GHz的AWR1x和IWR1x收發(fā)器,然后基于這兩片收發(fā)器推出了數(shù)個(gè)76-81GHz毫米波雷達(dá)前端,包括AWR1243、AWR1443、AWR1642。
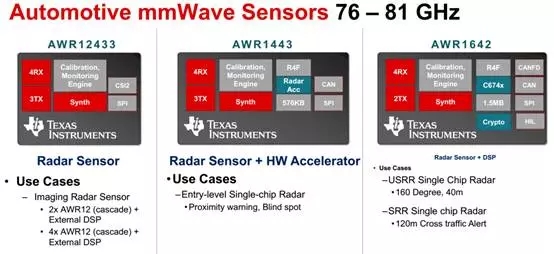
其中AWR1243明確指出,這是一個(gè)圖像雷達(dá)傳感器。這就超出大多數(shù)人的思維定勢(shì),毫米波雷達(dá)怎么能做圖像傳感器。當(dāng)然這個(gè)不是采用SAR合成孔徑的成像雷達(dá)。
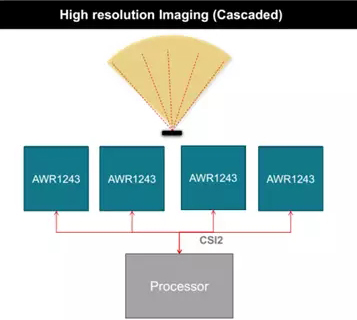
德州儀器不僅說(shuō)是圖像傳感器,更是在接下來(lái)的文檔里將4個(gè)AWR1243級(jí)聯(lián),達(dá)到高分辨率圖像。不過(guò)這個(gè)還是有點(diǎn)夸張了,德州儀器可能是特別強(qiáng)調(diào)級(jí)聯(lián)雷達(dá)的高分辨率,但要說(shuō)光學(xué)圖像級(jí)的分辨率還是不可能的。NXP則提出蠶繭式(Cocoon)毫米波雷達(dá)概念。也有可能是級(jí)聯(lián)應(yīng)用。

用多個(gè)雷達(dá)像繭一樣把蠶(車(chē))包起來(lái)。
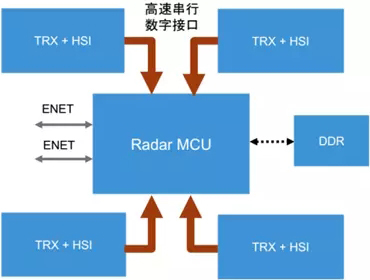
這就是雷達(dá)傳感器分布集中式處理,傳感器里只獲取最基本的雷達(dá)數(shù)字信號(hào),雷達(dá)數(shù)字信號(hào)集中處理,包括物體偵測(cè)、追蹤甚至是圖像處理。
76-81GHz雷達(dá)的歷史
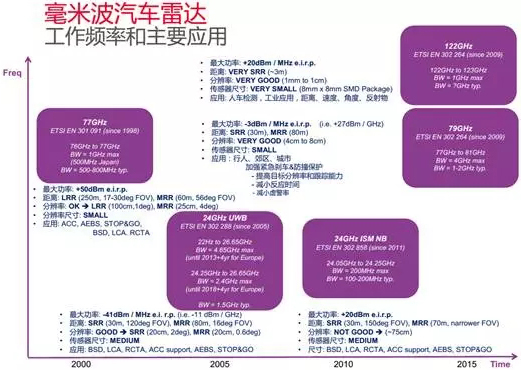
上圖為歐洲的毫米波雷達(dá)頻譜標(biāo)準(zhǔn)發(fā)展歷程(來(lái)源:是德科技)。
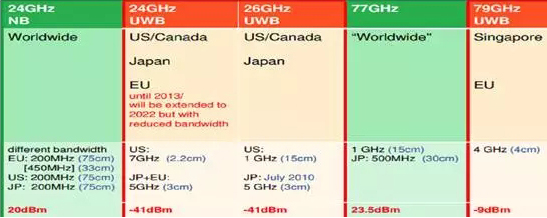
最早毫米波雷達(dá)是24GHz的窄帶毫米波雷達(dá),帶寬通常不到200MHZ,精度只有75厘米,目標(biāo)分離能力只有1.5米,顯然這太低了,即便作為盲點(diǎn)檢測(cè)也有點(diǎn)低了。這之后出現(xiàn)了超寬帶24GHz毫米波雷達(dá),帶寬最高達(dá)7GHz,精度可達(dá)2.2厘米。但是它有一個(gè)明顯的缺點(diǎn),就是發(fā)射功率太低,信噪比偏低,發(fā)射功率太低意味著探測(cè)距離有限,典型的5GHz帶寬的超寬帶24GHz毫米波雷達(dá)最大探測(cè)距離大約為30米。再有就是干擾風(fēng)險(xiǎn)(Interference Risk),頻率越低,干擾風(fēng)險(xiǎn)越高。窄帶24GHz毫米波雷達(dá)的干擾風(fēng)險(xiǎn)是最高的,超寬帶24GHz毫米波雷達(dá)略好,77GHz和79GHz就非常好。同時(shí)24GHz毫米波雷達(dá)的體積也比較大。此外,為了給5G或6G留出足夠的頻譜空間,汽車(chē)?yán)走_(dá)也不得不向更高頻率轉(zhuǎn)移。
為了達(dá)到高精度,同時(shí)還消除24GHz超寬帶毫米波雷達(dá)的缺點(diǎn),79GHz毫米波雷達(dá)出現(xiàn)了 。在WRC-15之前,車(chē)載雷達(dá)尚沒(méi)有全球 統(tǒng)一的頻率劃分,各汽車(chē)制造大國(guó)的微波車(chē)載雷達(dá)所使用的頻率主要集中在23-24GHz、60-61GHz和76-77GHz三個(gè)頻段。在歐洲,歐盟委員會(huì)決定從2013年起,會(huì)逐漸將車(chē)載雷達(dá)的使用頻率24GHz頻段調(diào)整到79GHz頻段。美國(guó)則使用24GHz和76~77GHz兩個(gè)頻段。日本是世界上唯一將車(chē)用雷達(dá)的頻段確定在60-61GHz的國(guó)家,后來(lái)又將79GHz頻段作為車(chē)用雷達(dá)系統(tǒng)的使用頻段。在WRC-15上,將79GHz頻段劃分給無(wú)線電定位業(yè)務(wù),以支持短距離高分辨率車(chē)載雷達(dá)的發(fā)展。中國(guó)剛完成24GHZ的頻譜規(guī)劃,77GHz還未有規(guī)劃標(biāo)準(zhǔn)。
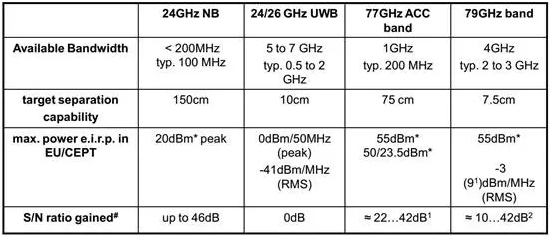
上圖是500MHz帶寬的77GHz FMCW雷達(dá)與4GHz帶寬的79GHzFMCW雷達(dá)的對(duì)比,對(duì)于500MHz帶寬的雷達(dá),兩個(gè)反射物都檢測(cè)不到,79GHz都能檢測(cè)得到,并且可以大致推算出兩者間的距離。77GHz的目標(biāo)分離精度是75厘米,也就是1.5米內(nèi)的目標(biāo)會(huì)被忽略,因此它只能檢測(cè)車(chē)輛。
MIMO與級(jí)聯(lián)
多輸人多輸出系統(tǒng)(MIMO,Multiple input multiple output)原本是控制系統(tǒng)中的一個(gè)概念,表示一個(gè)系統(tǒng)有多個(gè)輸入和多個(gè)輸出.如果將移動(dòng)通信系統(tǒng)的傳輸信道看成一個(gè)系統(tǒng),則發(fā)射信號(hào)可看成移動(dòng)信道(系統(tǒng))的輸入信號(hào),而接收信號(hào)可看成移動(dòng)信道的輸出信號(hào)。IM O 雷達(dá)的基本含義是:雷達(dá)采用多個(gè)發(fā)射天線,同時(shí)發(fā)射相互正交的信號(hào),對(duì)目標(biāo)進(jìn)行照射,然后用多個(gè)接收天線接收目標(biāo)回波信號(hào)并對(duì)其進(jìn)行綜合處理,提取目標(biāo)的空間位置和運(yùn)動(dòng)狀態(tài)等信息。
MIMO雷達(dá)虛擬陣的一個(gè)典型應(yīng)用是用于雷達(dá)二維成像,雷達(dá)二維成像的距離分辨力 主要取決于雷達(dá)信號(hào)的帶寬,方位分辨力主要取決于天線的波束寬度。要提高成像的距離分辨力,需要增加雷達(dá)信號(hào)的帶寬是相對(duì)比較容易的。而要提高雷達(dá)信號(hào)的方位分辨力,需要增大天線或陣列的孔徑,而這在實(shí)際中受到多方面因素的限制,有很大的難度。目前廣泛采用的解決辦法是采用合成孔徑技術(shù),在不增加天線物理尺寸的基礎(chǔ)上,得到大孔徑的陣列。與合成孔徑的思想不同,MIMO 雷達(dá)是利用多發(fā)多收的天線結(jié)構(gòu)等效形成虛擬的大孔徑陣列,獲得方位上的高分辨力。而這種虛擬陣的形成是實(shí)時(shí)的,能夠避免傳統(tǒng)的ISAR成像中存在的運(yùn)動(dòng)補(bǔ)償問(wèn)題。 故MIMO 雷達(dá)在成像應(yīng)用上有其獨(dú)特的優(yōu)勢(shì)。

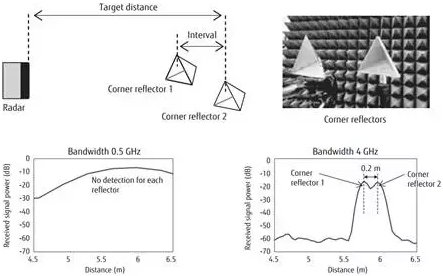
上圖為德州儀器測(cè)試的多片級(jí)聯(lián)雷達(dá)(MIMO)的FFT輸出圖,很明顯通道數(shù)越多,精細(xì)程度就越高。
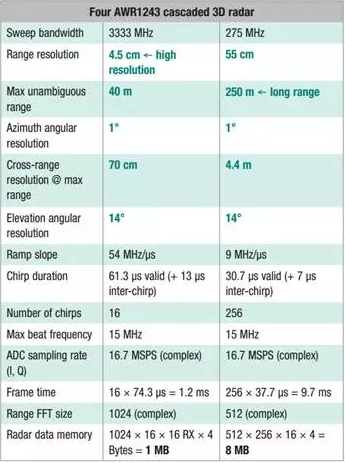
上表為德州儀器4個(gè)AWR1243級(jí)聯(lián)后雷達(dá)的參數(shù),遠(yuǎn)距離分辨力大大提高,40米處可以做到1度的方位角分辨率,也就是4.5厘米的精度和大約9厘米的物體分離精度。如果是百萬(wàn)像素45度FOV的攝像頭,那么40米處只有大約20像素的方位角分辨率,無(wú)法分清行人和騎行者。MIMO具備很寬的FOV,像德州儀器這種4個(gè)級(jí)聯(lián)的雷達(dá)FOV高達(dá)192度。而攝像頭的話80度的FOV 都算是廣角了,邊緣處可能有廣角失真。
一對(duì)發(fā)射陣元和接收陣元可以虛擬出一個(gè)收發(fā)陣元,則對(duì)于M發(fā)N收的MIMO雷達(dá) ,發(fā)射陣元和接收陣元共有M* N對(duì) ,即可以虛擬出M *N個(gè)收發(fā)陣元 ,其個(gè)數(shù)一般是遠(yuǎn)遠(yuǎn)大于N的,從而實(shí)現(xiàn)了陣列孔徑的擴(kuò)展。例如2發(fā)4收的MIMO雷達(dá),可以形成8元的虛擬陣列。
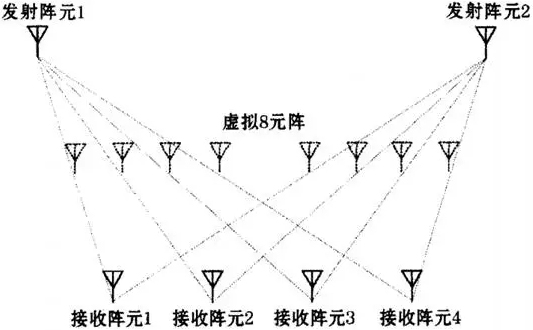
德州儀器使用4個(gè)3發(fā)4收的AWR1243雷達(dá),就是192個(gè)虛擬通道(天線或者叫陣列)。
79GHz雷達(dá)更適合CMOS RF工藝
毫米波雷達(dá)最突出的優(yōu)勢(shì)是價(jià)格低廉,即便是和視覺(jué)系統(tǒng)相比價(jià)格也不高。同時(shí)毫米波雷達(dá)是主動(dòng)型器件,而視覺(jué)系統(tǒng)是被動(dòng)型器件,主動(dòng)型器件有比較廣闊的挖掘潛力。被動(dòng)型器件,cmos圖像傳感器自問(wèn)世以來(lái),整體結(jié)構(gòu)未有變化。而收發(fā)器從SiGe轉(zhuǎn)換為硅基CMOS后,性價(jià)比進(jìn)一步提升。
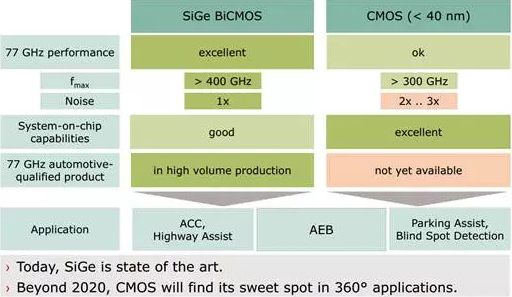
79GHz很適合多個(gè)級(jí)聯(lián)應(yīng)用,對(duì)價(jià)格敏感程度更高,采用硅基CMOS的需求更強(qiáng)烈。早在2013年,松下和富士通就開(kāi)發(fā)了79GHz的硅基CMOS工藝,NXP大約在2015年底推出79GHz硅基CMOS工藝?yán)走_(dá)收發(fā)器芯片,為40納米CMOS RF 工藝。
2016年6月,英飛凌和比利時(shí)IMEC推出28納米CMOS RF 工藝的79GHz雷達(dá)收發(fā)器芯片。在2017年2月,老牌模擬IC半導(dǎo)體廠家ADI推出28納米CMOS RF 工藝的79GHz雷達(dá)收發(fā)器芯片,ADI特別稱(chēng)之為Drive 360技術(shù),推測(cè)也是采用多個(gè)雷達(dá)級(jí)聯(lián)。
2017年4月,ADI則與瑞薩展開(kāi)77/79GHz雷達(dá)合作,ADI將使用瑞薩的Autonomy平臺(tái)的RH850/V1R-MMCU配合它家的毫米波雷達(dá),據(jù)稱(chēng)這是一款針對(duì)毫米波雷達(dá)開(kāi)發(fā)的MCU。
標(biāo)準(zhǔn)的無(wú)人駕駛系統(tǒng)中,激光雷達(dá)是主傳感器,負(fù)責(zé)3D周邊環(huán)境數(shù)字建模,提供SLAM。為路徑規(guī)劃和自主導(dǎo)航提供基礎(chǔ)。攝像頭主要是識(shí)別交通標(biāo)識(shí)。毫米波雷達(dá)目前主要是兩點(diǎn)應(yīng)用,一是檢測(cè)目標(biāo)的移動(dòng)速度然后與激光雷達(dá)融合,激光雷達(dá)也可以做到,但是毫米波雷達(dá)測(cè)速更加方便快捷。二是碰撞預(yù)警或避免碰撞。一旦偵測(cè)到有碰撞的潛在威脅,加速或減速來(lái)避免。可以稱(chēng)之為360度防撞雷達(dá),這也是未來(lái)多個(gè)79GHz雷達(dá)的典型應(yīng)用。
 粵公網(wǎng)安備 44030902003195號(hào)
粵公網(wǎng)安備 44030902003195號(hào)