前言
多旋翼無人機具有環保、噪音小、體積小、重量輕、成本低、攜帶方便,具有速度可控、垂直起降、精準懸停等優勢,已在民用領域,無人機在農林植保、搶險救災、物流運輸、安防巡檢等方面發揮了重要作用;同時在軍用領域,無人機因擁有高空、高速、隱身、長航時等特性,在戰場監視、情報搜集、電子偵察、指控通信、電子攻擊、火力打擊等領域承擔起越來越重要的任務。

圖1 多旋翼無人機
與此同時,隨著各種操縱方便的遙控直升機、多旋翼飛行器日漸普及,“黑飛”無人機干擾航空秩序等意外事件頻發,對重要地域安全保衛、治安管理等構成了嚴峻挑戰,引發各國對反無人機系統的高度關注。比如,國家禁飛區域包括:所有政府機構上空、所有軍事單位上空、政府執法現場、火車站、汽車站廣場等人流密集地方、危險物品工廠、倉庫等。
雖然部分無人機企業在其產品中為無人機飛行劃定了禁飛區域禁止飛行,但無人機配件在網上買賣的門檻很低,很容易就能夠組裝一臺能夠飛行的無人機。加之多數無人機用戶在沒有經過基礎的飛行及安全培訓,就在各種禁飛區域飛無人機,影響民航安全、炸機、傷人等事件頻繁出現。
因此,無人機的安全防范和管控,已經成為無人機行業的重點內容。無人機探測解決方案已經變得非常重要。可對無人機進行無線電信號偵測,實現無人機的無線電測向。


圖2 無人機偵測系統
測向天線陣
無人機測向天線陣按照采用的測向接收機不同,可以分為以下兩種:
-
單通道測向天線陣 無線電測向采用天線對信號源發出的信號進行接收,有些測向技術采用的是單個天線,但是測向系統采用的是多陣元天線陣作為空間信號的接收設備,通過對各個陣元天線間接收到信號的處理,獲得其幅度和相位,由于幅度和相位與信號的來波方向有關,所以根據這種關系可以確定信號的來波方向。
-
雙/多通道測向天線陣

圖3 測向天線分類
無人機測向天線陣受測向系統應用環境中物理結構的限制,天線布陣區域常常只能在某一特定的空間內。就干涉儀測向體制而言,常見的布陣形式有圖中所示幾種。
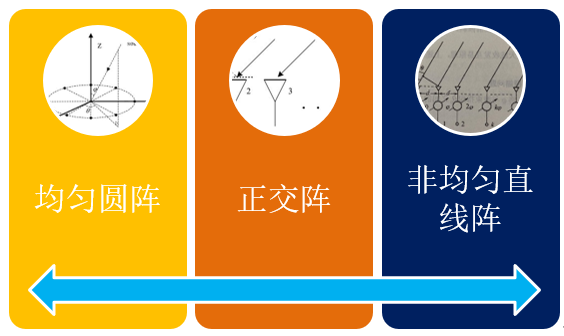
?圖4 測向陣天線陣型
從上圖可知,不論測向天線陣采用哪種實現形式,多陣元天線陣的樣式多種多樣,如五陣元天線陣、八陣元天線陣、四陣元天線陣、環形天線陣等。不同的天線陣有不同的布局,每種天線陣的特性也是大不相同,要根據實際的需要選擇不同形式的天線陣。
無論空間譜測向還是干涉儀測向,現在比較成熟的是均勻天線陣,如圓陣、線陣等。
便攜式測向天線陣子設計
本項目設計了小型化的陣子, 為了獲取良好的寬帶匹配效果,我們借助研發的python天線自動化設計平臺,對PCB電路的各參數進行了自動設計。
下面是整個軟件的啟動接口,分為四個函數模塊,分別完成天線建模、邊界條件設置、分析計算和工程保存功能。
# 天線建模
ANNT_DRAW()
# 設置邊界條件
ANNT_SETMART()
# 分析計算
ANNT_Analyze()
# 工程保存
ANNT_Save()
下圖是第一個函數完后天線建模后的模型, 從圖中可見,該天線陣子采用PCB電路形式實現偶極子天線,其在工作頻點處具有較寬波束和良好的50Ω匹配。陣子結構如下,在PCB的兩面分別為饋電點和輻射體,輻射體的結構可以實現較寬的波瓣。
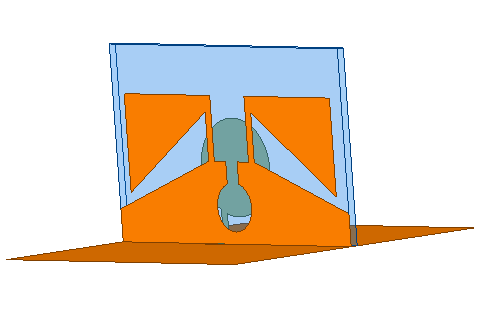
圖5 本文的測向陣子
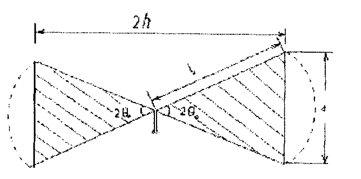
其工作原理與傳統的三角形PCB陣子相類似,可視作一種變形,當張角2Θ較大時具有較好的寬頻特性,但其數值分析比較困難,為了實現天線陣子的駐波比優于1.2,調用了python天線自動化設計平臺的天線自動建模模塊,由python 自主完成天線陣子模型的構建。
# 天線自動建模
def annt_modify():
draw_model()
result=annt_anysl()
for item in result:
if item["s11"]>-20:
changemode()
else:
break
?ANNT_SETMART()函數實現仿真前的邊界處理,包括設置材料屬性、激勵源設置以及輻射邊界設置等。
ANNT_Analyze()函數負責天線陣子的仿真,下面是該天線陣子的特性。
其S11如下圖所示,在工作頻點5.8GHz處其S11達到了-25dB,即VSWR<1.2。在該處阻抗實現良好匹配,意味著不需要額外的阻抗轉化電路就可以實現50Ω的匹配,簡化了電路設計,降低設計成本。

?圖6 S11曲線
圖7是該型陣子的電流分布,從圖中可以清晰的看出該陣子的饋電方式不但實現了阻抗匹配,同時也保證了有效饋電。
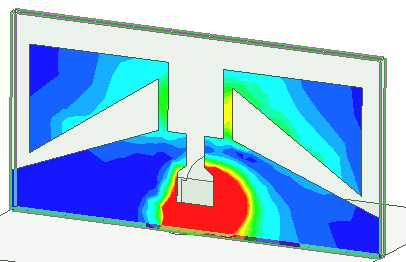
?圖7 電流分布
下圖是該陣子的不圓度,其具有良好的不圓度,從而有效的保障了使用該陣子作為測向天線陣的測向準確度。
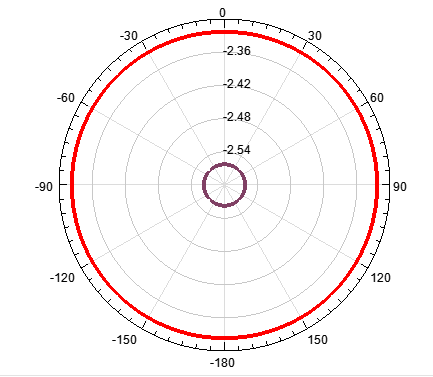
?圖 8 不圓度
下圖是天線陣子的方向性,陣子底部的反射板阻擋了其向后輻射,使其在H面為0度到90度。
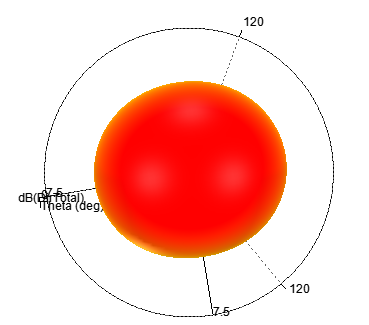
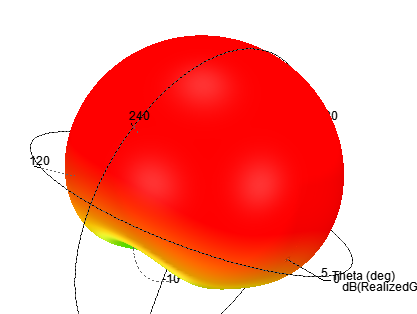
?圖9 測向陣子X-Y平面@5.8GHz
便攜式五陣元測向天線陣
基于上述的小型化天線陣元,設計了一款五陣元測向線陣,,它是將各陣元均勻等距的分布到一條直線上,陣元間隔是信號波長的二分之一,各陣元間具有相同的特性,如下圖所示。
該天線陣子的特定構型決定了其組成的天線陣具有兩種排列形式,分別如圖10和圖11 ,不同的排列方式中陣子間的寄生耦合是不同的,兩種構型必然有一種寄生耦合影響較小,那么選哪一種適合用于無人機的測向天線陣呢,我們下一期文章再見。
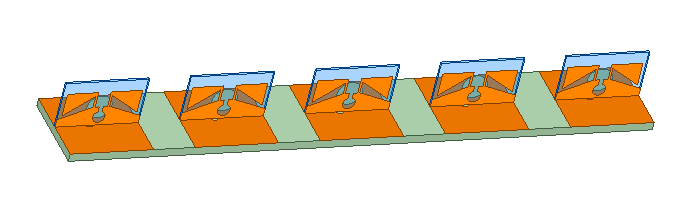
?圖10 五陣元測向線陣排列方式1
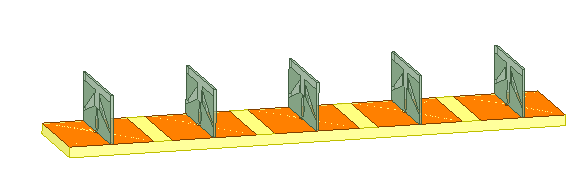
?圖11 五陣元測向線陣排列方式2
 粵公網安備 44030902003195號
粵公網安備 44030902003195號