在設計單片機程序的過程中,經常需要利用ADC采集外界模擬信號。有一些信號我們比較關注它的直流與低頻分量,希望將高頻噪聲濾除,就需要借助低通濾波器。
低通濾波器常見的利用電子電路實現的方式是一階RC無源濾波器。簡單講就是這樣:
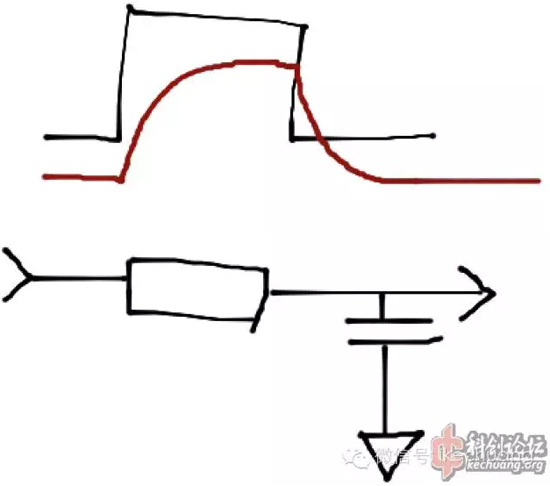
RC濾波器的各類計算略,有需要請谷歌。
RC濾波器用于單片機ADC輸入有許多缺點。如果R的取值較小,就要求C較大,同時輸入信號阻抗不能過大;如果R的取值較大,則ADC采樣瞬間釋放的電荷會使得端口電壓升高而無法在采樣時間內釋放到穩定水平。這會導致采樣精度問題。
而即便使用一個運放來緩沖RC濾波器的輸出,再接入ADC,也只解決了輸入阻抗問題,ADC電路受外界干擾仍然會在轉換結果中產生噪聲。因此,我們希望在單片機內部利用程序來實現低通濾波,徹底擺脫高頻噪聲。
數字低通濾波器有兩種形式,IIR和FIR。
IIR是無限脈沖響應濾波器,它的特點是輸出與無限久以前的輸入有關。這就如同上面RC濾波器的響應,隨著時間流逝,輸出電壓只會無限接近于輸入電壓,而不會等于。
用c語言實現IIR低通很簡單:
int last = 0;
//下面的函數以固定頻率運行,函數輸出就是IIR低通濾波器的輸出。
int lowpass(){
int this = ADC();
last = (this * 1 + last * 15) / 16; //新的last 是舊的last * 15 / 16 + this * 1 / 16
return last;
}
如果對函數返回值作圖,得到的波形就會和RC濾波器的波形一樣。要改變截止頻率,只需要改變函數第二句中新的last的組成(例如改成3/4和1/4,截止頻率會提高)。
值得注意的是,上述代碼使用了整數乘法和2的n次冪除法,因此編譯優化后,在8位平臺上運行超快。如果你使用帶有浮點運算模塊的平臺,請直接使用浮點數。
IIR的特點是節省內存,上面的濾波器只使用了兩個變量。
IIR的缺點是不穩定。如果你把15改成17,顯然這個濾波器的輸出會在一段時間后溢出。你必須負責保證IIR濾波器穩定。
FIR是有限脈沖響應濾波器,它的特點是輸出與有限久以前(一段時間內)的輸入有關。由于數字系統中采樣是離散的,每一段時間內的采樣數是固定的,所以FIR濾波器的每一個輸出值,可通過對之前的若干個數量固定的采樣值進行計算得到。特別是,因為對固定數量的采樣值的計算在FPGA電路中可以并行實現,因此FIR濾波器常常被用于基于FPGA的數字信號處理系統。相對的,IIR濾波器不依賴之前的采樣,但依賴于之前的濾波器狀態(存在反饋),因此在大部分比一階低通濾波器復雜的應用場合,IIR濾波器的各項特性沒有FIR穩定(若要實現穩定,對計算精度要求較高),而且計算起來比FIR要慢,設計上也沒有通用性。
下面我用c語言實現一個最簡單的FIR低通。我們將最近的8次采樣值加起來,求平均值,作為輸出。
int buf[8];int lowpass()
{
int k = 7;
while(k--)
buf[k] = buf[k-1]; //將buf[6] 移到buf[7], buf[5] 移到buf[6],等等,以空出buf[0]
}
buf[0] = ADC();
return (buf[0] + buf[1] +...+ buf[7]) / 8;
}
這個濾波器的時域圖像有點像這樣:
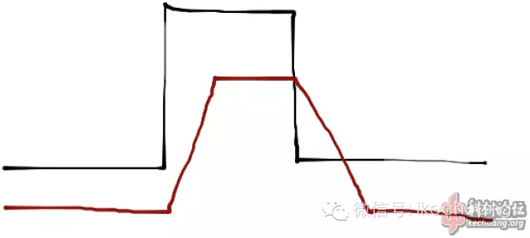
值得注意的是,上面這個函數可以被進一步簡化,以加速計算。上面這種濾波器有另一個名字:滑動平均濾波器,這個濾波器大部分股民應該很熟悉。
雖然時域圖像很美觀,但是這個濾波器的頻域圖像一點也不美觀:
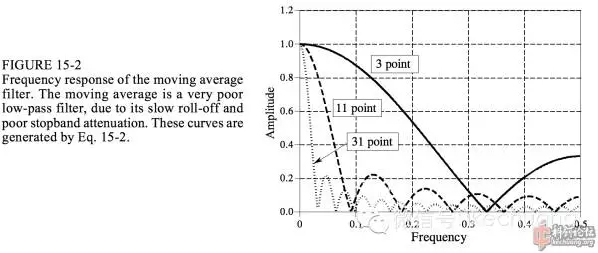
可見,隨著點數的增加,圖像看起來只是從右向左縮水,對高頻的抑制并不好。
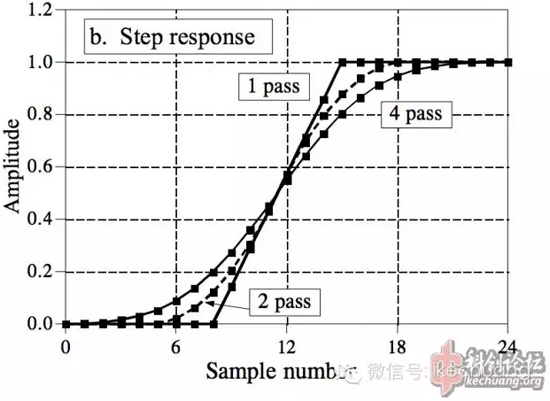
所以如果想要獲得比較好的低通效果,不應該增加點數,而應該將多個一樣的FIR濾波器串聯使用(一個的輸出作為下一個的輸入)。
注:pass是“遍”的意思,表示迭代次數。
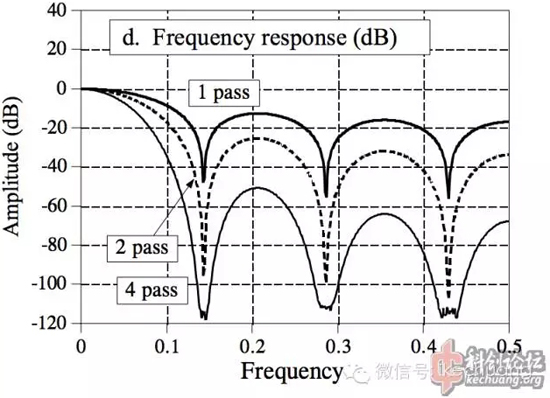
上面是串聯使用的幅頻響應。而時域圖像也很美觀:
結尾給出的是寫這篇文章時隨手找到的資料。大家一定要學會使用谷歌搜索英文關鍵詞,因為老外比我們對待知識的態度更嚴肅也更開放。
http://www.analog.com/media/en/technical-documentation/dsp-book/dsp_book_Ch15.pdf
剛才的滑動平均濾波器,時間復雜度是O(n)(設每次處理n個采樣)。
可以優化為O(1)的形式:
int buf[8];int k=0;
int result=0;
int lowpass()
{
result -= buf[k];
buf[k] = ADC();
result += buf[k];
k = (k + 1) % 8;
return result;
}
 粵公網安備 44030902003195號
粵公網安備 44030902003195號