摘要:軟件無線電的基本思想是將寬帶A/D及D/A盡可能靠近天線,將無線電臺的各種功能在一個開放性、模塊化的通用硬件平臺上盡可能多的用軟件來實現。軟件無線電已成為移動通信中的關鍵技術之一。文中基于軟件無線電采用軟件實現通用硬件調制的目的,通過基帶信號處理算法,結合軟件無線電接收機中的相關理論對其中的調制方式識別和解調算法進行了仿真,說明了各個解調模塊的功能,而且也驗證了系統的科學性和可實現性。
關鍵詞:軟件無線電;調制解調模型;算法;載波同步;定時同步
無線通信系統有許多種的調制方式,這些調制方式由于其自身特點而也適用于各種不同場合。由于其通訊模式不兼容,所以滿足不了不同通訊模式之間的兼容要求。而且,因為不同頻段的電臺也只能滿足某些特定的要求,無法滿足各種各樣的軍事需求。
軟件無線電這一新概念一經提出,就得到了全世界移動通信領域的廣泛關注。根據軟件無線電擁有的靈活型、開放型等特點,使其不僅在軍事民用移動通信中得了應用,而且會在其他如電子戰、雷達、信息花家電等領域得到更廣泛的應用。
1 軟件無線電簡介
軟件無線電的基本原理是在一個通用劃、標準化、模塊化的硬件平臺上,用軟件編程來完成無線電臺的各種功能,不同于創痛的基于硬件、面向用途的電臺設計模式。要用軟件來實現功能實現就需要求減少功能單調、靈活型差的硬件電路不分。尤其是減少模擬處理部分,讓數字化處理器(A/D和D/A變換)盡可能靠近發射端。軟件無線電的核心是整體結構的開放型和全面可編程型,即可以利用軟件的更新實現硬件的協調,從而實現新的功能。一般采用總線結構,因為具有標準的、高性能的開放式,方便對硬件模塊的升級和擴展。
相應的軟件無線電的結構如圖1所示。

圖1 軟件無線電組成結構圖
2 研究發展現狀
目前,軟件無線電在軍事通信及移動通信領域研究非常活躍。軟件無線電在3G通信系統中也有許多應用實例。國內軟件無線電方面的研究尚處于起步階段,目前只有幾家單位進行這方面的研究,而且相互之間很少交流。要在這方面取得突破性的進展尚需一段時間。
3 軟件無線電解調模型
從理論上來說,各種通信信號都可以用正交調制的方法加以實現,如圖2所示。
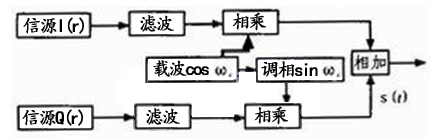
圖2 正交調制實現框圖
根據圖2,可以寫出它的時域表達式:
調制信號S(t)為
S(t)=I(t)cos(ωct)+Q(t)cos(ωct)(1)
ωc=2πfc (2)
ωc為采樣頻率的角頻率。在對調制信號和載波頻率進行數字化時,其采樣頻率可能不一樣。這里多相濾波器的主要作用就是用來提高數據源的采樣速率,使得調制信號的采樣速率和載波的采樣速率一致。
盡管調制樣式多種多樣,但實質上調制不外乎用調制信號去控制載波的某一個(或幾個)參數,使這個參數按照調制信號的規律而變化的過程。載波可以是正弦波或脈沖序列,以正弦型信號作為載波的調制叫做連續波調制。
對于連續波調制,已調信號的數字表達式為:
S(n)=A(n)cos[ω(n)n+θ(n)](3)
調制信號可以分別“寄生”在已調信號的振幅、頻率和相位θ(n)中,相應的調制就是調幅、調頻及調相這三大類熟知的調制方式。由于頻率與相位有著一定的關系,為便于分析,可將上式改寫為:

這就是利用XQ、XI直接計算f(n)近似公式。這種方法只有乘法和減法運算,計算比較簡便。最后得到的軟件無線電數字正交解調的通用模型。
4 仿真模型
4.1 解調信號的仿真
從理論上說,各種通信信號都可以用正交調制的方法加以實現,正交調制的模型如圖3所示。在本例中,首先產生兩列二進制的0、1序列I、Q,經過差分編碼后,用兩列正交載波信號對其進行調制,調制后的信號相加即可得到FM信號。調制后得到的FM信號如圖3所示,圖中橫坐標為時間秒。在這里為了與上節相對應,我們所采用的仿真信號參數與之基本相同,載波頻率為20 kHz,采樣頻率為160 kHz。
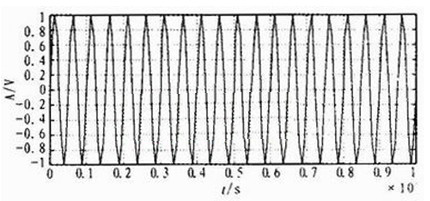
圖3 FM信號
全數字FM解調器的核心問題在于對載波和定時的同步,其性能的好壞將直接對通信質量產生影響,因此將主要針對這兩個同步來進行仿真。在本解調方案中采用數字相干解調的方式,這就要求接收方必須從接收信號中恢復出發射端載波信號,使雙方載波的頻率、相位一致。
FM調制信號是抑制載波的信號,無法用常規鎖相環或窄帶濾波器直接提取參考載波,其載波相位變化只能取有限的幾個離散值,這就隱含了參考載波的相位信息。所以可以通過非線性處理,消除信號中的調制信息,產生與原載波相位有一定關系的分量,然后再提純該信號,恢復己被抑制的載波信號,進而完成信號的相干解調。在這里采用基于判決的數字COSTAS鎖相環來提出相干載波。COSTAS環的框圖如圖4所示。下面對照圖4分析一下COSTAS載波同步環的工作原理。
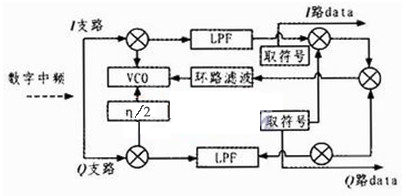
圖4 科斯塔斯換的框圖
如果不考慮噪聲的影響,輸入的數字化后FM信號可以表示為:
SFM=a(k)cosωck-b(k)sinωck (12)
其中,ωc載波頻率,a(k)、b(k)為發送的碼元信號。假設數控振蕩器產生的相干載波為:cos(ωck+△φ),△φ調制載波與相干載波的相位差,經過相干解調輸出的信號為:
I(k)=a(k)cos△φ+b(k)sin△φ (13)
Q(k)=b(k)cos△φ-a(k)sin△φ (14)
通過式13和式14可以看出I(k)、Q(k)兩路數字基帶信號中含有相位誤差信息,那么科斯塔斯環的鑒相器得到的相位誤差e(k)為:
e(k)=I(k)sign(Q(k))-Q(k)sign(I(k)) (15)
在科斯塔斯環的設計中,采用FIR低通濾波器作為匹配濾波器,通帶截止頻率為10 kHz,阻帶起始頻率為20 kHz。環路濾波器采用三階切比雪夫低通濾波器,阻帶起始頻率為10 kHz。仿真后,鑒相誤差和恢復的載波信號如圖5所示。
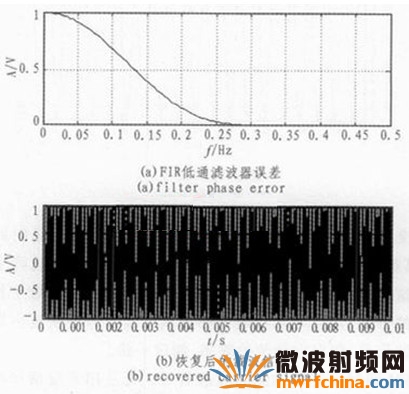
圖5 濾波器的誤差和恢復后的載波信號
從圖5中可以看到,在0.4 s左右載波同步誤差趨近于零,也就是說此時載波已經獲得了同步,如果碼元周期為0.1 s,那么經過4個碼元周期就可以完成載波同步。
4.2 定時同步
數字通信系統是一個同步通信系統,應使收發兩端信息碼流速率和相位保持同步關系,因而需要同步信號來保證系統中傳輸的信息碼流有同樣的速率。當系統達到了準確定時后,將能夠在接收信號的波形峰值點對其進行采樣,使接收端有最大的接收信噪比。
信號經過匹配濾波后,輸出數字基帶信號,通過一個定時檢測電路獲取定時誤差信息e(k),通過環路濾波器和控制器反饋給內插模塊,這就相當于在時域上再次采樣,以得到正確的同步信號。
定時同步的首要問題在于定時誤差的提取,在此Gardner算法使用的要更為廣泛一些。它對每個信號波形需要兩個采樣值,而且對載波偏差不敏感,于是我們可以在定時恢復后再去糾正載波偏差,使這一任務得到了簡化。Gardner算法求取定時誤差為:en=(yn-yn-2)·yn-1,其中yn-1與yn相差半個信號波形周期。
采用Gardner算法進行仿真,輸入信號的相位估值如圖6所示。
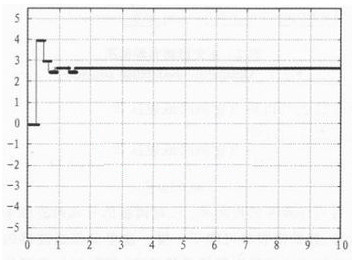
圖6 輸入信號的相位估值
經過定時同步后的輸出信號就是經過相位校正后的輸入信號,也就是說上圖的I路和Q路信號就是的XI、XQ的值,根據前面介紹的解調算法就可以得到一組碼元序列。為了避免相干解調時存在的相位模糊問題,我們在發送端對信號進行了差分編碼,所以在接收端,只要進行差分譯碼就可以恢復出原始的傳輸信號。
5 結論
文中對軟件無線電的結構和目前的關鍵技術做了一個概括性的介紹,并且對基帶信號的處理算法進行了詳細的討論。在對基于決策理論的信號調制樣式自動識別的算法進行仿真,該仿真過程不但說明了各個解調模塊的功能,而且也驗證了系統的科學性和可實現性。最后對一些能夠影響接收機誤碼率的誤差源進行了建模,通過仿真重點考察了載波同步和定時同步與接收機誤比特率的關系,得到了靜態相位誤差、符號同步誤差以及信噪比對誤比特率的影響。
作者:楊明極,馬琳
 粵公網安備 44030902003195號
粵公網安備 44030902003195號