UHF RFID閱讀器基帶處理接收端電路的設(shè)計
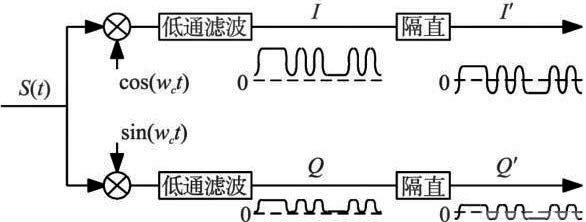
圖2、ASK 解調(diào)示意圖
2. 2、PSK 解調(diào)子模塊
當(dāng)閱讀器接收來自電子標(biāo)簽的信號采用PSK調(diào)制時,接收信號可以用如下表達式表示:

式中A0 為信號穩(wěn)定幅度值,Φm 為調(diào)制相位值(BPSK調(diào)制時取0或π),g ( n - m )、頻率偏移、相位差△φ 、n0 與對式( 1)的描述相同。
載波頻偏和相差將會影響PSK 信號的正確解調(diào),所以在對PSK 信號進行解調(diào)時必須進行載波同步。PSK 解調(diào)的具體實現(xiàn)電路如圖3所示,由相位旋轉(zhuǎn)、相位誤差提取和二階相位跟蹤環(huán)三部分組成。
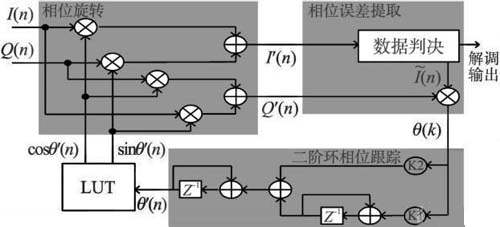
圖3、PSK解調(diào)示意圖
在相位旋轉(zhuǎn)過程中有四個乘法運算,而若在用硬件實現(xiàn)時直接調(diào)用四個硬件乘法器,將會消耗很大的硬件資源。所以本文在設(shè)計中只使用一個乘法器,然后用一個計數(shù)器來控制分時復(fù)用,從而節(jié)省資源。
為實現(xiàn)相位跟蹤,相位誤差提取部分根據(jù)MAP算法來估計得到相位誤差信號θe ( n )。θe ( n )反映了環(huán)路跟蹤相位的程度,但不能直接用于相位旋轉(zhuǎn),因為:1.存在噪聲干擾;2.由于存在載波頻率偏移,載波相位誤差會隨時間積累。所以需要對θe ( n)進行濾波和積分,進而實現(xiàn)相位跟蹤,其實現(xiàn)如圖3中的二階相位跟蹤環(huán)部分所示。
設(shè)計中,K 1、K 2 分別取值1 /256、1 /8。用硬件實現(xiàn)時,乘K 1、K 2 的運算可以用簡單的右移運算來完成,而不必調(diào)用復(fù)雜的硬件除法器。
3、解碼器設(shè)計
解碼器包括FM0解碼器、M iller解碼器、CRC 校驗器、幀起始超時檢測和解碼結(jié)果同步輸出控制五個主要子模塊。FM 0 /M iller解碼后的數(shù)據(jù)data 若需要進行CRC 校驗,則進入CRC 校驗器進行CRC校驗并輸出校驗結(jié)果。由于幀結(jié)束在有的情況下不能完全確定,而需要借助CRC 校驗來確定幀的結(jié)尾,所以在解碼器r中還有一個解碼結(jié)果同步輸出子模塊用來控制同步解碼結(jié)果輸出。幀起始超時檢測模塊是用來進行幀起始超時檢測的,當(dāng)輸入有效數(shù)據(jù)后超過規(guī)定時間沒有檢測到正確的幀起始序列,則輸出錯誤標(biāo)志脈沖。
3. 1、FM0解碼子模塊
FM0解碼子模塊由幀起始檢測、FM0 解碼/編碼規(guī)則檢測/幀結(jié)束檢測以及輸出同步脈沖產(chǎn)生三部分組成,如圖4所示。

圖4、FM0解碼子模塊框圖
幀起始檢測部分中設(shè)有一個十八位的移位寄存器data_ r[ 17:0] ,當(dāng)檢測到幀起始序列(即data_ r[ 11:0] = “110 100 100 011”) 時,幀起始信號o _start輸出一個脈沖,并置indecode有效,表示開始接收到新的幀數(shù)據(jù);FM0 解碼/編碼規(guī)則檢測/幀結(jié)束檢測部分,在indecode有效時,在解碼同步脈沖信號o_pulse的同步下對data _r[ 2:0]進行分析判斷,若data_r[ 0]與data_r[ 1]相同則輸出o_data= ?1 ,反之則輸出o_data= “0”;同時檢測da ta_r[ 1]與data_r[ 2] ,若兩個相同,則出現(xiàn)了不符合FM0編碼規(guī)則的情況,輸出編碼規(guī)則錯誤標(biāo)志信號o _code_err為“1”;在o_start脈沖后對i_pu lse進行二分頻得解碼輸出同步脈沖o _pulse,o_pu lse 用于同步解碼過程和解碼后數(shù)據(jù)輸出。
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號